Lecture 0 - Overview of Reinforcement Learning in 30 Minutes

Lecture 0 - Overview of Reinforcement Learning in 30 Minutes
PenryOverview of Reinforcement Learning in 30 Minutes
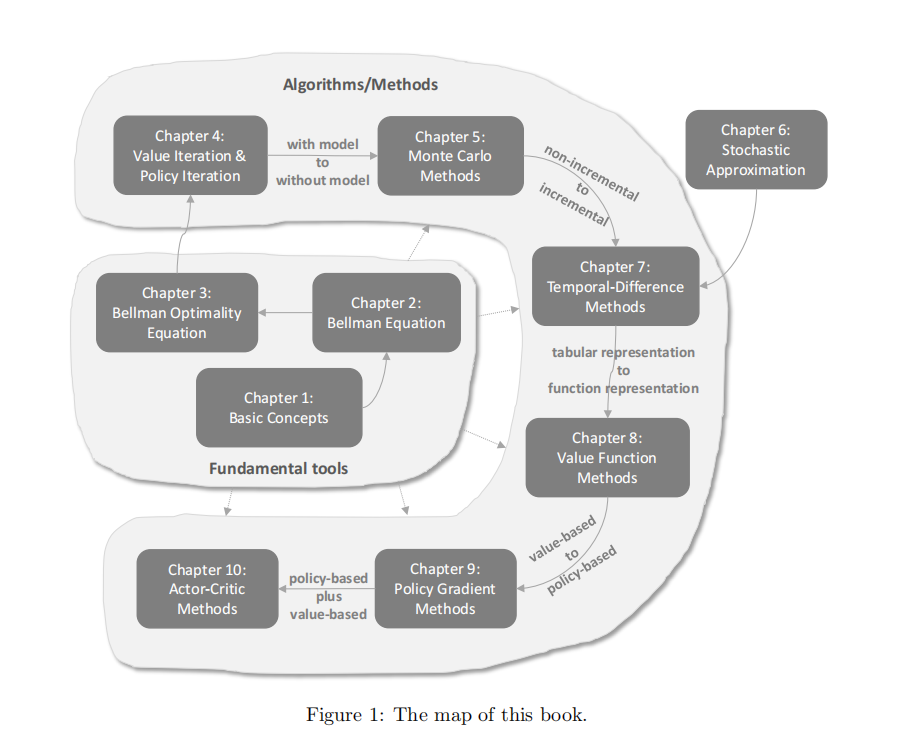
- Not just the map of this course, but also for RL fundations.
- Fundamental tools + Algorithms and methods.
- Importance of different parts.
- Chapter 1: Basic Concepts
- Concepts: state, action, reward, return, episode, policy,…
- Grid-world examples
- Markov decision process (MDP)
- Fundamental concepts, widely used later
- Chapter 2: Bellman Equations
- One concept: state value
- One tool: Bellman equation
- Policy evaluation, widely used later
- One concept: state value
- Chapter 3: Bellman Optimality Equations
- A special Bellman equation
- Two concepts: optimal policy and optimal state value
- One tool: Bellman optimality equation
- Fixed-point theorem (不动点原理)
- Fundamental problems
- 最优策略、最优的 state value是否存在
- 最优的 state value 是唯一的
- 最优的策略可能是 deterministic,也可能是 stochastic
- 一定存在确定性的最优策略
- An algorithm solving the equation
- Optimality, widely used later
- Chapter 4: Value Iteration & Policy Iteration
- First algorithms for optimal policies
- Three algorithms:
- Value iteration (VI) (值迭代)
- Policy iteration (PI) (策略迭代)
- Truncated policy iteration (截断策略迭代)
- Policy update and value update, widely used later
- Need the environment model
- Chapter 5: Monte Carlo Learning
- Gap: how to do model-free learning?
- Mean estimation with sampling data
- First model-free RL algorithms
- Algorithms:
- MC Basic (基本的 MC 算法)
- MC Exploring Starts (探索开始的 MC 算法)
- MC -greedy (基于 -贪婪的 MC 算法)
- Chapter 6: Stochastic Approximation
- Gap: from non-incremental to incremental
- Mean estimation
- Algorithms:
- Robbins-Monro (RM) algorithm ( Robbins-Monro 算法)
- Stochastic gradient descent (SGD) (随机梯度下降算法)
- SGD, BGD, MBGD
- Chapter 7: Temporal-Difference Learning
- Classic RL algorithms
- Algorithms:
- TD learning of state values (TD 学习状态值)
- SARSA: TD learning of action values (TD 学习动作值)
- Q-learning: TD learning of optimal action values (TD 学习最优动作值)
- On-policy & off-policy (基于策略与非基于策略)
- 强化学习中有两个策略:
- behavior policy,用于生成经验数据
- target policy,用于指导价值函数的更新
- 如果 behavior policy 与 target policy 相同,即 ,则称为 on-policy learning(基于策略学习)
- 如果 behavior policy 与 target policy 不同,即 ,则称为 off-policy learning(非基于策略学习)
- 强化学习中有两个策略:
- Unified point of view
- Chapter 8: Value Function Approximation
- Gap: tabular representation to function representation
- Algorithms:
- State value estimation with value function approximation (VFA) (状态值估计与价值函数近似):
- SARSA with VFA (Sarsa 算法与价值函数近似)
- Q-learning with VFA (Q-learning 算法与价值函数近似)
- Deep Q-learning
- State value estimation with value function approximation (VFA) (状态值估计与价值函数近似):
- Neural networks come into RL
- Chapter 9: Policy Gradient Methods
- Gap: from value-based to policy-based
- Contents:
- Metrics to define optimal policies:
- Policy gradient:
- Gradient-ascent algorithm (REINFORCE):
- Metrics to define optimal policies:
- Chapter 10: Actor-Critic Methods
- Gap: policy-based + value-based
- Algorithms:
- The simplest actor-critic (QAC)
- Advantage actor-critic (A2C)
- 引入了一个 baseline ,用于减少方差
- Off-policy actor-critic
- 使用 Importance sampling 的方法使得 QAC 由 on-policy 向 off-policy 转换
- Deterministic actor-critic (DPG)
- Gap: policy-based + value-based



喜欢这篇文章的人也看了


评论
匿名评论隐私政策
TwikooWaline
✅ 你无需删除空行,直接评论以获取最佳展示效果